Как сделать легкого робота

Как сделать робота своими руками
Хирургическая операция для лечения рака легких всегда была основным методом лечения. Чтобы получить доступ к легким, торакальный хирург должен сделать заднелатеральную торакотомию, которая включает в себя разрез от 13 см до 25 см в длину. Так как на месте операционного разреза всегда находятся ребра, то иногда ребро может быть временно удалено, или используется специальное оборудование для расширения ребер, чтобы получить доступ к легким. Однако, благодаря недавним изменениям в малоинвазивной хирургии, большинство процедур, таких как лобэктомия удаление доли в легком , можно сделать с гораздо меньшими физическими повреждениями и потерей крови. Что касается минимально-инвазивных хирургических процедур, в настоящее время доступны два варианта: видеоадаптивная торакальная хирургия VATS и роботизированная хирургия.









О чем речь? Программирование роботов сильно отличается от написания программ другого вида. В данном случае программист пишет не только код, но и взаимодействует с окружением машины, а также с ее механикой и электроникой.
- Как проходят роботические операции?
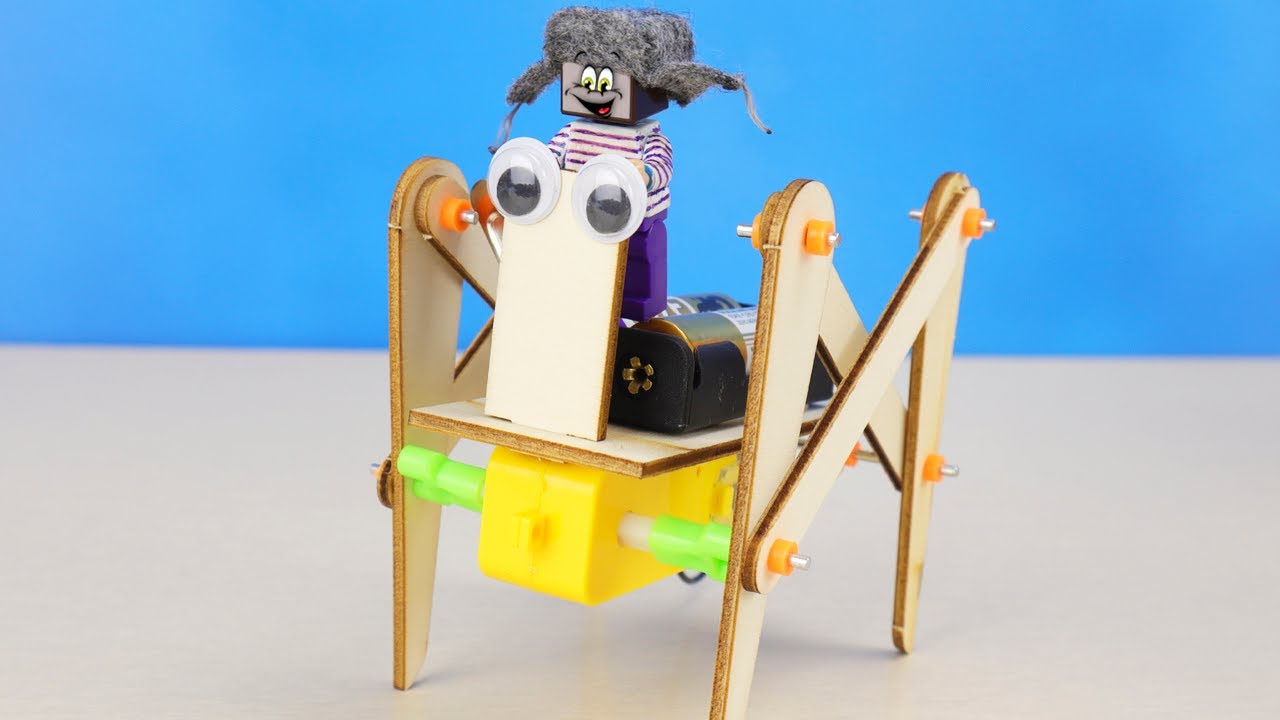
- Ищете, что бы смастерить? Не хватает идей для вдохновения?
- Модель: L20 Ultra Complete. Максимальная мощность всасывания:
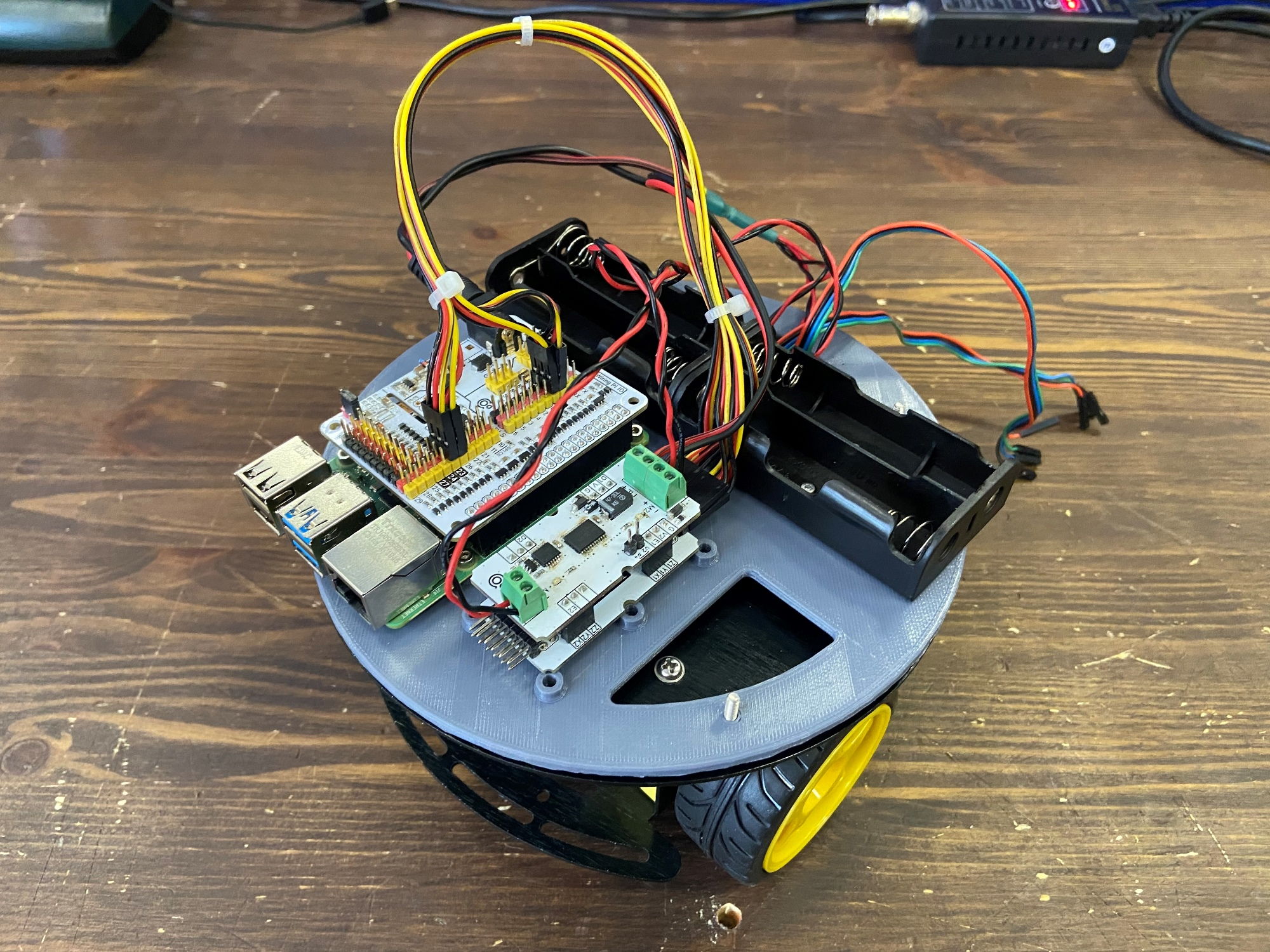
- Введение: Представляем вам очень простого робота, построенного на основе arduino.
- Содержание
- Выбор самой главной части любого робота — его мозга — это очень важный и ответственный этап его построения. Рассмотрим возможные варианты: как и любая попытка классификации — это довольно спорный и неполный список, но, как основа для дальнейшей работы, сойдёт и такой :.
- В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System.
- Стационарная модель Hi-End класса, предназначенная для моделирования разнообразных клинических ситуаций в самых различных областях, но прежде всего интенсивной терапии, анестезиологии и реанимации в условиях стационара.









В этой статье, с пошаговой инструкцией по сборке, вы сможете создать робота, объезжающего препятствие, на базе микроконтроллера Arduino , в домашних условиях. Если сенсор обнаружит препятствие, сервопривод позволит избежать столкновения. Сканируя пространство, робот выберет наиболее подходящее направления для объезда. Помимо платы и сенсора для настоящего робота, нам необходимы материалы:. Так же с инструментов вам понадобятся дрель, суперклей, отвертка, клеевой пистолет. Запитаем нашего робота 9В батарейкой крона , она компактная и дешевая , но через час она разрядится, потому, по желанию, вы можете запитать от аккумулятора на В.